
 Italiano
Italiano
We design and produce robotised stations, in particular for Pick and Place systems. Our model includes the study of ad hoc solutions that implement the most innovative robotics and picking systems.
Our experience has developed over many years of working with systems from various manufacturers (ABB, Kuka, Omron, Kawasaki, etc.) integrated with software control systems featuring 3D simulation of the robotised stations.
We've also developed our know-how about collaborative robots. In contrast to traditional robots, they have the advantage of being able to "interact" with the human staff from a perspective of total efficiency, functionality and safety.
Some of our Robots & Motion Control success stories:
Smartplant: Automotive IP Assembly Line + EOL
 Taiprora designed and delivered a semi-automatic assembly line + full-automatic EOL check and traceability system to assemble cockpits in a third-party automotive corporate.
Taiprora designed and delivered a semi-automatic assembly line + full-automatic EOL check and traceability system to assemble cockpits in a third-party automotive corporate.
 Download this PDF 101
Download this PDF 101 Palletizing and Pallet Handling System in the packaging department
 For a multinational pharmaceutical company, we have created a palletizing system, physically connected to both the production and the warehouse, through a system of about 40 meters of roller conveyors.
For a multinational pharmaceutical company, we have created a palletizing system, physically connected to both the production and the warehouse, through a system of about 40 meters of roller conveyors.
Download this PDF 94 4.0 machine to assemble/disassemble turbocompressors for petrol, diesel and electric engines.
 R&D project for Industry 4.0 that integrates the connection between physical and digital systems with a complex Big Data analysis using the most advanced technologies: Web Supervisor and SmartGlass, MachineLearning and Conditional Monitoring applied to predictive maintenance, SensorWear and BigData for dyadic man - cobot).
R&D project for Industry 4.0 that integrates the connection between physical and digital systems with a complex Big Data analysis using the most advanced technologies: Web Supervisor and SmartGlass, MachineLearning and Conditional Monitoring applied to predictive maintenance, SensorWear and BigData for dyadic man - cobot).
Download this PDF 92 Artificial vision system for real-time quality control by a collaborative robot
 Within an automotive seat production line, a fully automated real-time quality control system was introduced through a collaborative robot system equipped by sensors and cameras, with consequent zeroing of production waste.
Within an automotive seat production line, a fully automated real-time quality control system was introduced through a collaborative robot system equipped by sensors and cameras, with consequent zeroing of production waste.
Download this PDF 91 Collaborative Smartbench: Automotive Assembly Workstation
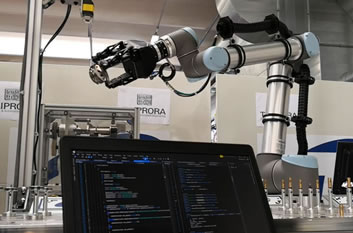
 For an enterprise in Automotive area, we have designed and built an Industry 4.0 project, named “Collaborative Smartbench”: a series of assembling benches for the Porsche Cayenne interior panels. A step towards innovation is the use of a Universal Robots’ collaborative robot: thanks to its compactness and axle handling at almost 360° it is ideal for this application. This choice has allowed us to offer our customer higher quality and an effective reduction in security costs.
For an enterprise in Automotive area, we have designed and built an Industry 4.0 project, named “Collaborative Smartbench”: a series of assembling benches for the Porsche Cayenne interior panels. A step towards innovation is the use of a Universal Robots’ collaborative robot: thanks to its compactness and axle handling at almost 360° it is ideal for this application. This choice has allowed us to offer our customer higher quality and an effective reduction in security costs.
Download this PDF 82 Ultrasonic Welding Machine: Robotised ultrasonic welding system
 The system, created for a multinational leader in the automotive component sector, consists of a complete automated welding line, using ultrasounds, for parts on panels made of plastic for automotive doors. The robots and structure for welding are equipped with ultrasonic sonotrodes.
The system, created for a multinational leader in the automotive component sector, consists of a complete automated welding line, using ultrasounds, for parts on panels made of plastic for automotive doors. The robots and structure for welding are equipped with ultrasonic sonotrodes.
Download this PDF 74 Palletising and handling system in packing department
 The CHC department Palletising and Pallet Handling System, produced entirely by Taiprora (integration of mechanical components, electrical systems and software) for a pharmaceutical multinational, comprises the following subsystems: - Lifts; - Handling 1 (feeding of boxes to the palletising area); - MAL (in case of waste boxes, the system permits their ejection through the dedicated returns rollers towards the MAL area); - Handling 2 (receives the boxes from the rollers managed by Handling 1 and permits palletising via Robot); - ABB IRC5 palletising robot; - Wrapping machine
The CHC department Palletising and Pallet Handling System, produced entirely by Taiprora (integration of mechanical components, electrical systems and software) for a pharmaceutical multinational, comprises the following subsystems: - Lifts; - Handling 1 (feeding of boxes to the palletising area); - MAL (in case of waste boxes, the system permits their ejection through the dedicated returns rollers towards the MAL area); - Handling 2 (receives the boxes from the rollers managed by Handling 1 and permits palletising via Robot); - ABB IRC5 palletising robot; - Wrapping machine
Download this PDF 66 Design and production of automatic stations for loading and unloading graphite components onto/from presses with ABB anthropomorphic arm
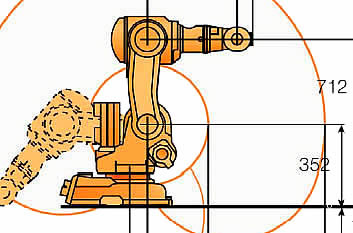 For a multinational in the graphite part production sector, various picking systems have been created with ABB anthropomorphic arm suitable for positioning (after receiving from a vibratory bowl) two formats of graphite washers, individualised, from 2 separate lines, in their pallets.
For a multinational in the graphite part production sector, various picking systems have been created with ABB anthropomorphic arm suitable for positioning (after receiving from a vibratory bowl) two formats of graphite washers, individualised, from 2 separate lines, in their pallets.
Download this PDF 8 Revamping of automated confectionery warehouse
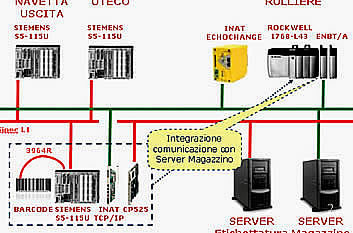 Main operations: Addition of H1 network card (CP 1431 TCP) to Siemens S5 Master PLC; Removal of Siemens S7 input Shuttle PLC; Addition of AB input Shuttle PLC with communication with the Siemens S5 master via Wi-Fi Ethernet with RF remote control hidden in the area outside the shuttle; Addition of AB input Roller PLC with communication with the Siemens S5 master via Ethernet;
Main operations: Addition of H1 network card (CP 1431 TCP) to Siemens S5 Master PLC; Removal of Siemens S7 input Shuttle PLC; Addition of AB input Shuttle PLC with communication with the Siemens S5 master via Wi-Fi Ethernet with RF remote control hidden in the area outside the shuttle; Addition of AB input Roller PLC with communication with the Siemens S5 master via Ethernet;
Download this PDF 2  Welcome to Taiprora Digital Factory
Welcome to Taiprora Digital Factory







